
풍력 터빈에서 요축 오정렬은 무엇입니까?
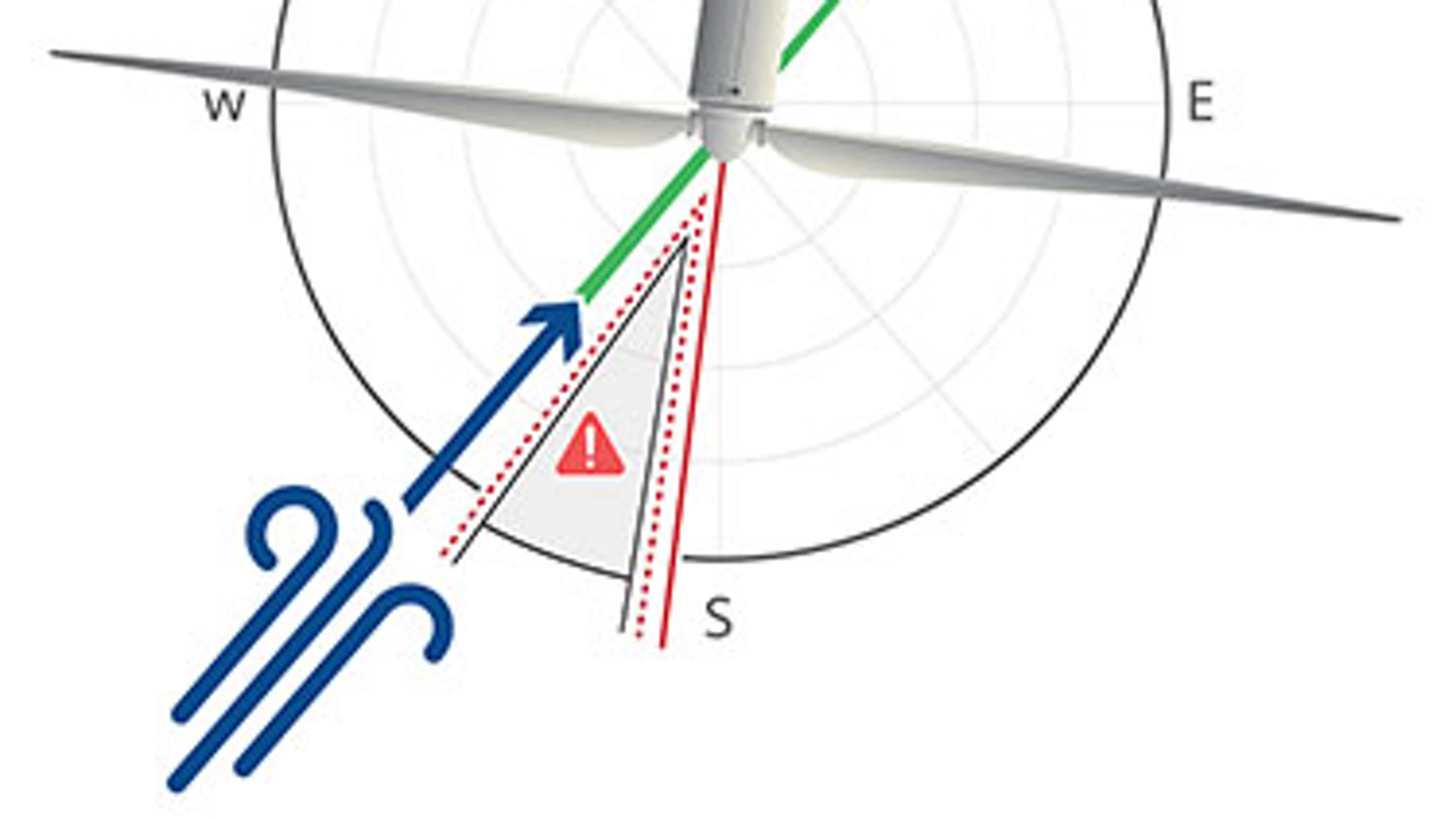
풍력 터빈의 로터와 블레이드가 바람으로 직접 향하지 않을 때 요축 오정렬이 발생합니다. 이상적으로, 풍력 터빈은 바람의 방향에 수직으로 정확하게 배치됩니다. 이 위치에서 풍력 터빈은 바람의 전류에서 최대 에너지 양을 받습니다.
대부분의 풍력 터빈은 어느 정도 요축 오정렬이 있어서 전력 생산이 감소합니다. 요축 오정렬 8도로 풍력 터빈의 연간 에너지 생산(AEP)을 약 2% 감소할 수 있습니다. 또한 요축 오정렬은 터빈 기계 시스템에서 불필요한 스트레인과 마모를 일으켜 에너지를 줄일 수 있습니다.
요축 오정렬의 원인은 무엇입니까?
요축 오정렬을 유발할 수 있는 여러 가지 요인이 있습니다. 한 가지 일반적인 요인은 풍향계 및 요축 포지셔닝 시스템의 방향 교정이 정확하지 않은 것입니다. 이는 일반적으로 요축 시스템의 마모 및 파열로 인한 기계적 문제에서 비롯됩니다.
또 다른 일반적인 요인은 잘못된 바람 방향 감지입니다. 이는 회전하는 풍력 터빈 블레이드에 의해 트리거된 나셀 풍속계가 난류를 만날 때 발생할 수 있습니다.
마지막으로, 터빈을 언제, 어떻게 흔들어야 하는지 결정하는 잘못된 제어 시스템 설정도 오정렬의 원인이 될 수 있습니다. 이러한 요인 중 상당수는 노후화된 시스템에 뿌리를 두고 있습니다.
요축 오정렬을 감지하는 방법
요축 오정렬은 일반적으로 두 가지 방법 중 하나를 통해 감지됩니다. 첫 번째 방법은 풍력 터빈에 LiDAR 시스템을 장착하는 것입니다. 이렇게 하면 회전하는 블레이드에 의해 '소용돌이'가 되기 전에 바람 속도와 방향을 정확하게 판독합니다. 그렇지만 이것은 대형 풍력 발전 단지에서 값비싼 접근 방식이 될 수 있습니다.
다른 방법은 목표 풍력 터빈 근처에 있는 타워에서 독립적인 풍속계를 활용한 다음 유닛의 센서와 판독값을 비교합니다.
두 방법 모두 시간이 많이 소요되며 기준 데이터만 제공합니다. 따라서 종종 전체 파워 출력을 생성하기 위해 올바른 요축 위치를 자동으로 찾는 발전된 제어 알고리즘에 의해 요축 오정렬을 감지할 필요성이 대체됩니다.
요축 부정렬을 해결하는 방법
현대 터빈 제어 시스템 개조는 발전된 제어 로직을 활용하여 오정렬로 인한 최적 이하 터빈 성능을 완화합니다. 자가 보정 요축 제어 알고리즘은 정적 요축 오정렬을 감지하고 연속 정렬을 제공하여 터빈이 그 잠재력을 완전히 발휘하도록 합니다.
Emerson은 표준 풍력 터빈 제어 시스템 개조의 일환으로 자가 보정 요축 제어 알고리즘을 포함합니다. 추가 센서가 필요하지 않습니다. 머신 러닝으로 구성된 알고리즘은 일반적으로 설치 후 자동 교정에 짧은 2주 기간이 필요합니다. 풍향계 및 요축 교정이 더욱 이동하거나 저하되는 경우, 적응하고 자동 교정합니다.
그 결과 올바른 로터 포지셔닝을 갖춘 풍력 터빈과 터빈 제너레이터의 전력 성능 최적화가 이루어 지고 있습니다. Emerson 개조는 터빈의 수명을 연장하고 일반적으로 연간 3~5% 더 많은 생산을 제공하여 1년 내에 회수할 수 있습니다. 풍력 터빈 개조 페이지를 방문하여 자세히 알아보십시오.